Archives
February 2024
Categories
All
|
Back to Blog
Tomoyuki Suzuki, Kenji Hirohata, Yasutaka Ito, Takehiro Hato, Akira Kano J. Comput. Nonlinear Dynam. November 2023, 18(11): 111001. https://doi.org/10.1115/1.4063224 This paper proposes a sparse modeling method for automatically creating a surrogate model for nonlinear time-variant systems from a small number of time-series data. The proposed method is an improvement over a method for sparse identification of nonlinear dynamical systems first proposed in 2016, for application to temperature prediction simulations. The form of the thermal model is constrained by the physical model, and we use three novel machine-learning methods to efficiently estimate the model parameters. We verify the proposed method’s effectiveness using time-series data obtained by thermo-fluid analysis of a power module mounted on a comb-shaped heat sink. The proposed method has potential applications in a wide range of fields where the concept of equivalent circuits is applicable. Because the proposed method requires few data, has high extrapolation accuracy, and is easily interpreted, we expect that design parameters can be fine-tuned and actual loads considered, and that condition-based maintenance can be realized through real-time simulations. 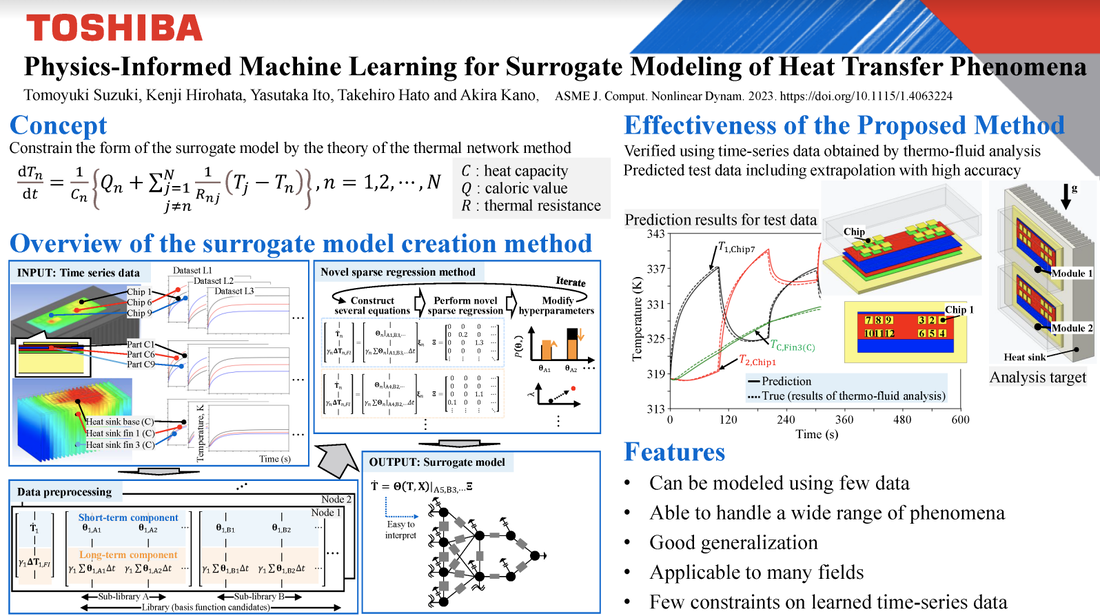
0 Comments
Back to Blog
Josh H. P. Henry and Jacqueline Bridge ASME. J. Comput. Nonlinear Dynam. August 2023; 18(8): 081012. https://doi.org/10.1115/1.4062660 A major issue with advancing prosthetics and robotics technology is mimicking natural motion. Super-Coiled Polymer (SCP) actuators are an economical and high-yield alternative to traditional actuators. However, the challenge lies in identifying suitable applications due to their hysteresis. By comparing SCP actuators with varying thread sizes, this paper suggests potential directions for their utilization. The actuators were created using coiling and heat training, controlled by Arduino. MATLAB was used to analyze the recorded data, focusing on the motion to assess the hysteresis characteristics. The observed characteristics inform recommendations for diverse applications in sensitive and coarse control systems. 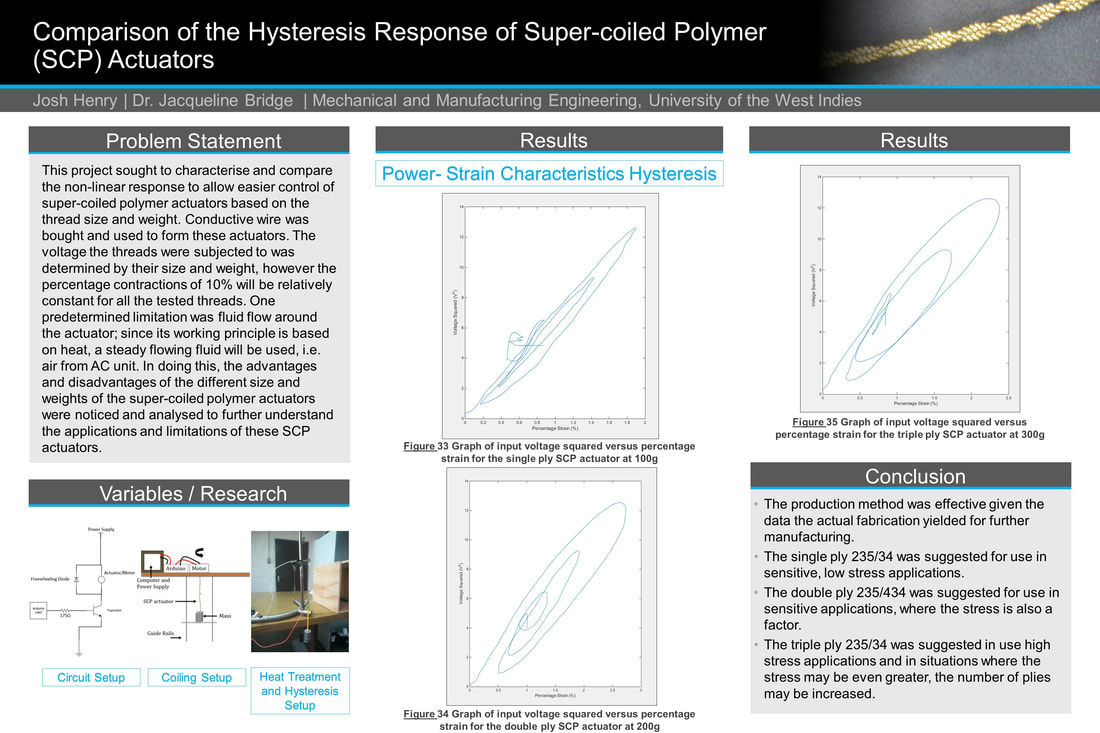
Back to Blog
Wu, Q., Spiryagin, M., and Cole, C. (September 16, 2022). "Block–Wheel–Rail Temperature Assessments Via Longitudinal Train Dynamics Simulations." ASME. J. Comput. Nonlinear Dynam. November 2022; 17(11): 111007. https://doi.org/10.1115/1.4055431 Two research gaps were identified in block-wheel-rail temperature assessment. First, current studies are not combined with train dynamics which are better descriptions of the block-wheel-rail working environment. Second, current studies cannot simulate long rail sections. This paper developed a block-wheel-rail temperature assessment model by following the Finite Element idea. Models were validated by comparing with ANSYS Finite Element models and measured data. Case studies were carried out by combining the temperature model with a Longitudinal Train Dynamics model. A full-service and an emergency brake simulation were carried out for a 150-wagon heavy haul train on a 5,680 m long rail section. The results show that, due to brake force differences at different wagon positions, the maximum block and wheel temperature differences among individual wagons in the full-service brake simulation were 117.01 and 117.91 °C respectively. This highlighted the contribution of introducing train dynamics into block-wheel-rail temperature assessment. Rail temperature increases caused by wheel-rail temperature differences and frictional heating were about 10.60 and 2.65°C, respectively. 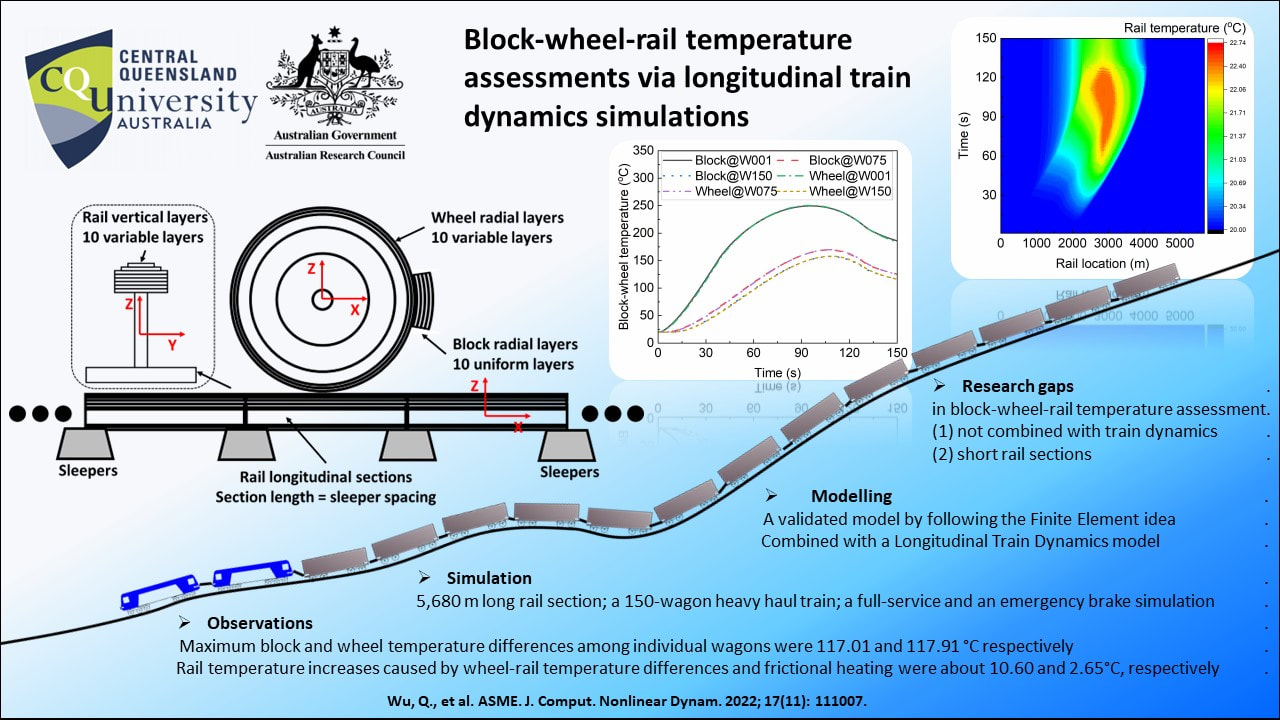 |
 RSS Feed
RSS Feed

JOURNAL OF COMPUTATIONAL and
NONLINEAR DYNAMICS COMPANION |
QUICK LINKS |

|
Copyright © 2021 Journal of Computational and Nonlinear Dynamics