Archives
February 2024
Categories
All
|
Back to Blog
Josh H. P. Henry and Jacqueline Bridge ASME. J. Comput. Nonlinear Dynam. August 2023; 18(8): 081012. https://doi.org/10.1115/1.4062660 A major issue with advancing prosthetics and robotics technology is mimicking natural motion. Super-Coiled Polymer (SCP) actuators are an economical and high-yield alternative to traditional actuators. However, the challenge lies in identifying suitable applications due to their hysteresis. By comparing SCP actuators with varying thread sizes, this paper suggests potential directions for their utilization. The actuators were created using coiling and heat training, controlled by Arduino. MATLAB was used to analyze the recorded data, focusing on the motion to assess the hysteresis characteristics. The observed characteristics inform recommendations for diverse applications in sensitive and coarse control systems. 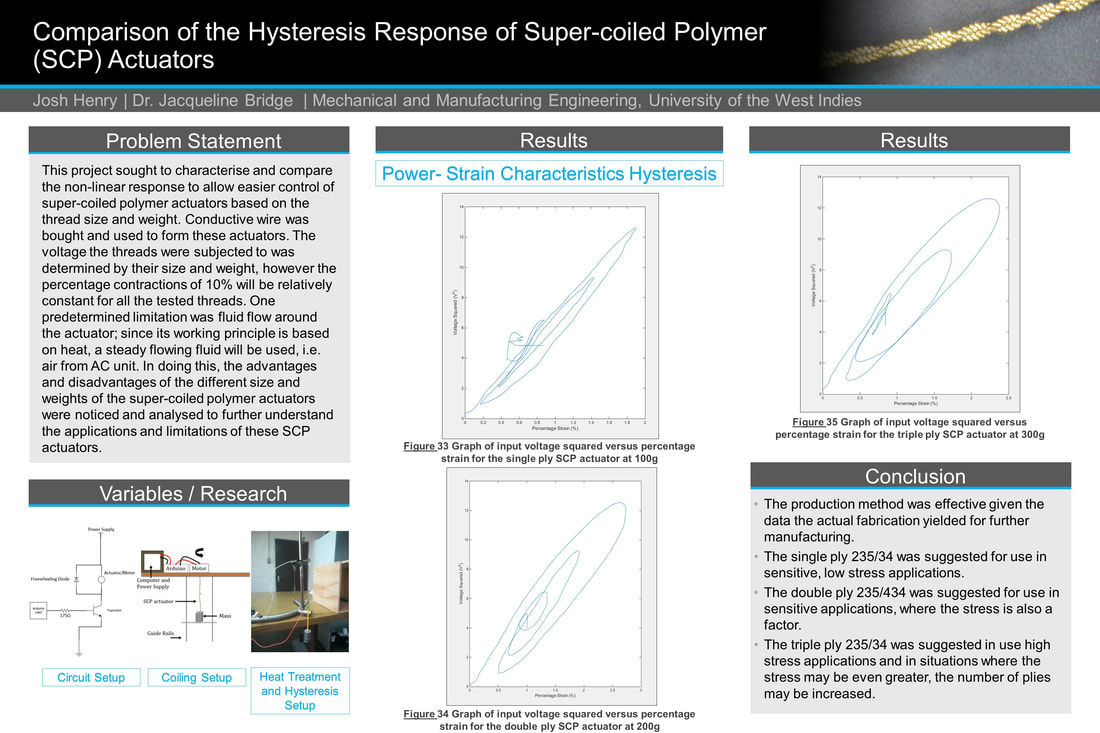
0 Comments
Back to Blog
Albert Peiret, Francisco González, József Kövecses, and Marek Teichmann (February 24, 2020). "Co-Simulation of Multibody Systems With Contact Using Reduced Interface Models." ASME. J. Comput. Nonlinear Dynam. April 2020; 15(4): 041001. https://doi.org/10.1115/1.4046052 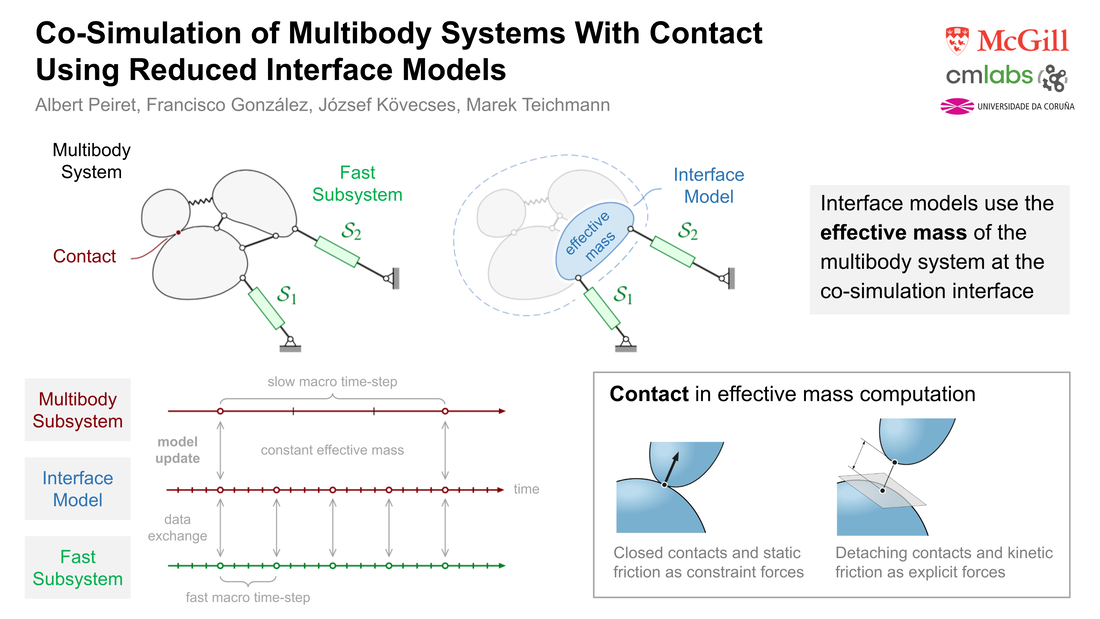 Co-simulation techniques enable the coupling of models of physically diverse subsystems in an efficient and modular way. Communication between subsystems takes place at discrete time points and is limited to a given set of coupling variables, while the internal details of the subsystems remain undisclosed, and are generally not accessible to the rest of the simulation environment. This can lead to the instability in non-iterative co-simulation that is commonly used in real-time applications. The stability of the simulation in these cases can be enhanced using reduced, effective models of one or more subsystems. These reduced models provide physically meaningful information to the other subsystems between communication points. This work describes such interface models and their application in co-simulation for nonsmooth mechanical systems subjected to unilateral contact and friction. The performance of the proposed approach is shown in some challenging examples of non-iterative, multirate co-simulation interfacing mechanical and hydraulic subsystems. The use of an interface model improves stability and allows for larger integration step-sizes, thus resulting in more efficient simulation.
|
 RSS Feed
RSS Feed

JOURNAL OF COMPUTATIONAL and
NONLINEAR DYNAMICS COMPANION |
QUICK LINKS |

|
Copyright © 2021 Journal of Computational and Nonlinear Dynamics